skule.sormo.no
ORG NR 885 947 522
CAN/I2
{jcomments on}
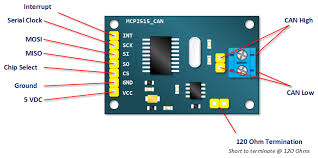
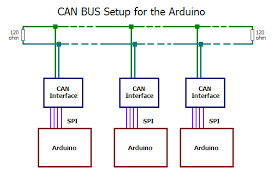
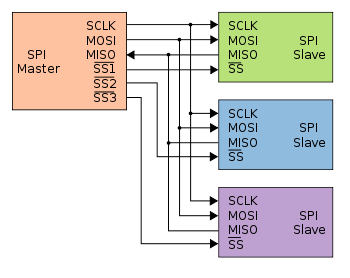

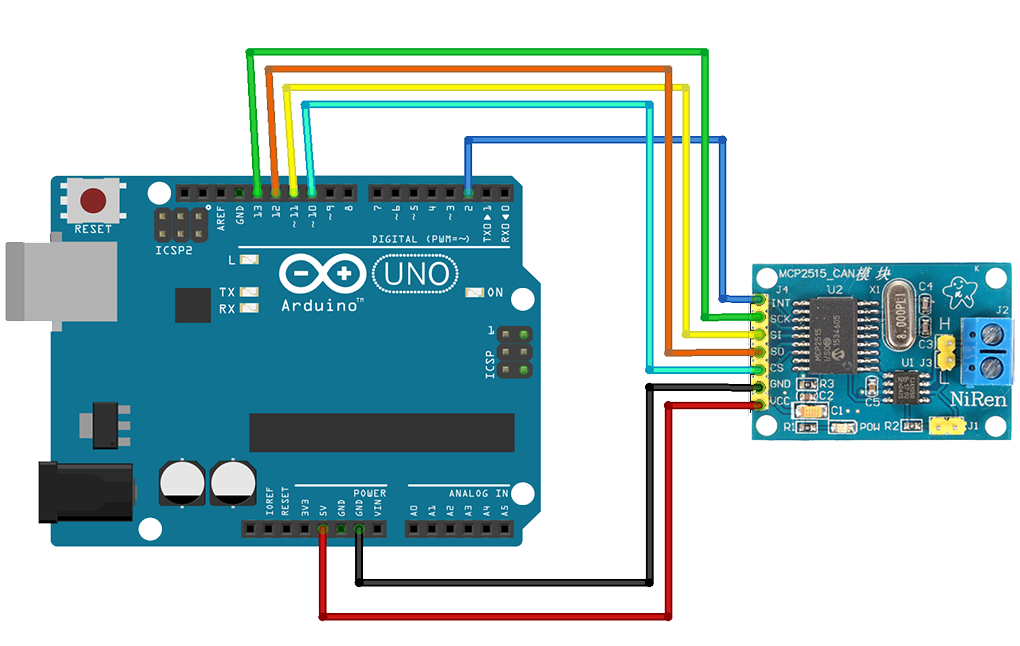
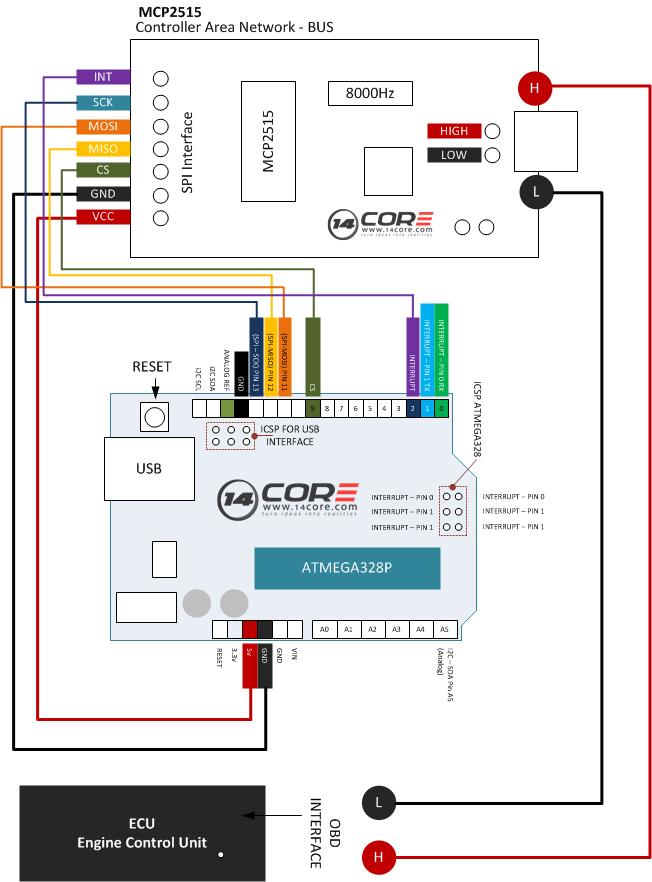
CAN, I2C og SPI er tre ulike seriesynkronmetoder for Arduino. Her brukes SPI for å kommunisere til en interface-krets som kobles til CAN-bussen.
Arduino MEGA: Får ikke SPI-biblioteket til å snakke med mega..
CAN tutorial: https://www.cooking-hacks.com/documentation/tutorials/can-bus-module-shield-tutorial-for-arduino-raspberry-pi-intel-galileo/
Ressurs: https://modelrail.otenko.com/arduino/arduino-controller-area-network-can