skule.sormo.no
ORG NR 885 947 522
Arduinoprosjekter
Arduinoprosjekter
Å jobbe med prosjekter med Arduino-kontrollere er å gå inn i en spennende, kreavtiv verden. Arduino består av et enormt nettsamfunn der ulike prosjekter legges ut og kankopieres fritt for andre brukere . DIY-prosjekter (Do It Yourself) kjennertegner dette samfunnet. Det er utrolig mye rart som legges ut, fra de helt enkle programskisser til det mest sammensatte systemer som brukes for eksempel i droner eller 3D-printere. Her er det lagt ut noen prosjekter som er utført i dette forumet.
sim800
asdf
Fjernstyrt port i hønsehus
Et hønsehus med gårdsplass for frittgående høner har en port som kan åpnes og stenges med mobiltelefonen. Telefonen har en webadresse til en Node-Red-konfigurert MQTT-server som styrer en mikrokontroller som åpner og lukker porten. Detaljer om prosjektet med programkoder er lagt ut på GitHub.
ESC DIY
Med hall-sensorer: https://simple-circuit.com/arduino-cd-rom-brushless-motor-control/
Uten hallsentosrer: https://simple-circuit.com/arduino-cd-rom-brushless-motor-control/


Analog kjøretøykontroll med mobiltelefon
{jcomments on}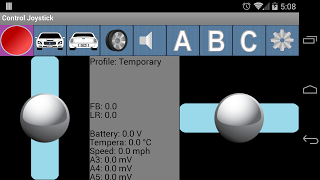 Dette prosjektet bruker mobiltelefonappen Control Joystick for å styre et kjøretøy med variabel fart og svingradius. I tillegg har den et utvalg av muligheter for styring av andre funksjoner og for å lese variable fra kjøretøyet som sendes tilbake til telefonappen.
Dette prosjektet bruker mobiltelefonappen Control Joystick for å styre et kjøretøy med variabel fart og svingradius. I tillegg har den et utvalg av muligheter for styring av andre funksjoner og for å lese variable fra kjøretøyet som sendes tilbake til telefonappen.
https://sites.google.com/site/bluetoothrccar/home/6-Joystick-Control
Styring av kjøretøy med faste drivhjul
{jcomments on} Denne Arduino-skissen leser to RC-kanaler og styrer fart og sving på kjøretøy med faste drivmotorer, enten en eller to på hver side. Kjøretøyet svinger når det er ulik hastighet på de to sidene av kjøretøyet.
Denne Arduino-skissen leser to RC-kanaler og styrer fart og sving på kjøretøy med faste drivmotorer, enten en eller to på hver side. Kjøretøyet svinger når det er ulik hastighet på de to sidene av kjøretøyet.
Med appen 'Control Jpystick' på Android-telefonen er det muligå bruke blueooth til å kommunisere med kjøretøyet
Dreie kjøretøy mot kompasskurs
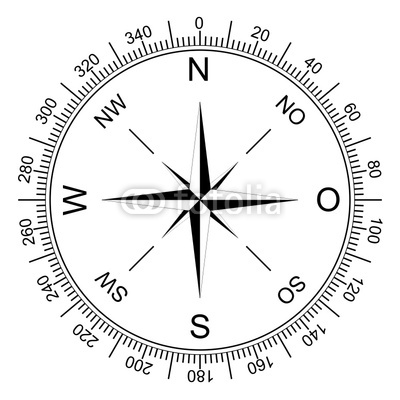 Denne programskissen styrer et kjøretøy mot en angitt kompasskurs.
Denne programskissen styrer et kjøretøy mot en angitt kompasskurs.
Når ny kompasskurs blir gitt, må kjøretøye dreie enten mot venstre eller høyre , - fortrinnsvis den veien som er kortest, for å fortsette mot den nye kursen.
Kompasskursen oppgis ved hjelp av en IMU som har kompassmodul eller en enkelt HMC5883L-krets som kommuniserer ved hjelp av en I2C-bus. Kjøretøyet har da en en kurs som endres, og nå kjøretøyets retning endres mot den nye kursen. Dette skulle en tro er enkelt, men dersom ny kurs er 10 grader og gjeldende kurs er 340 grader, er det kortest å svinge til høyre, selv om å svinge til venstre reduserer kursen gradvis til 10 grader. Men da har kjøretøyet snurret unødvendig rundt for å komme på den nye kursen.
LCD-display til I2C-bus
{jcomments on}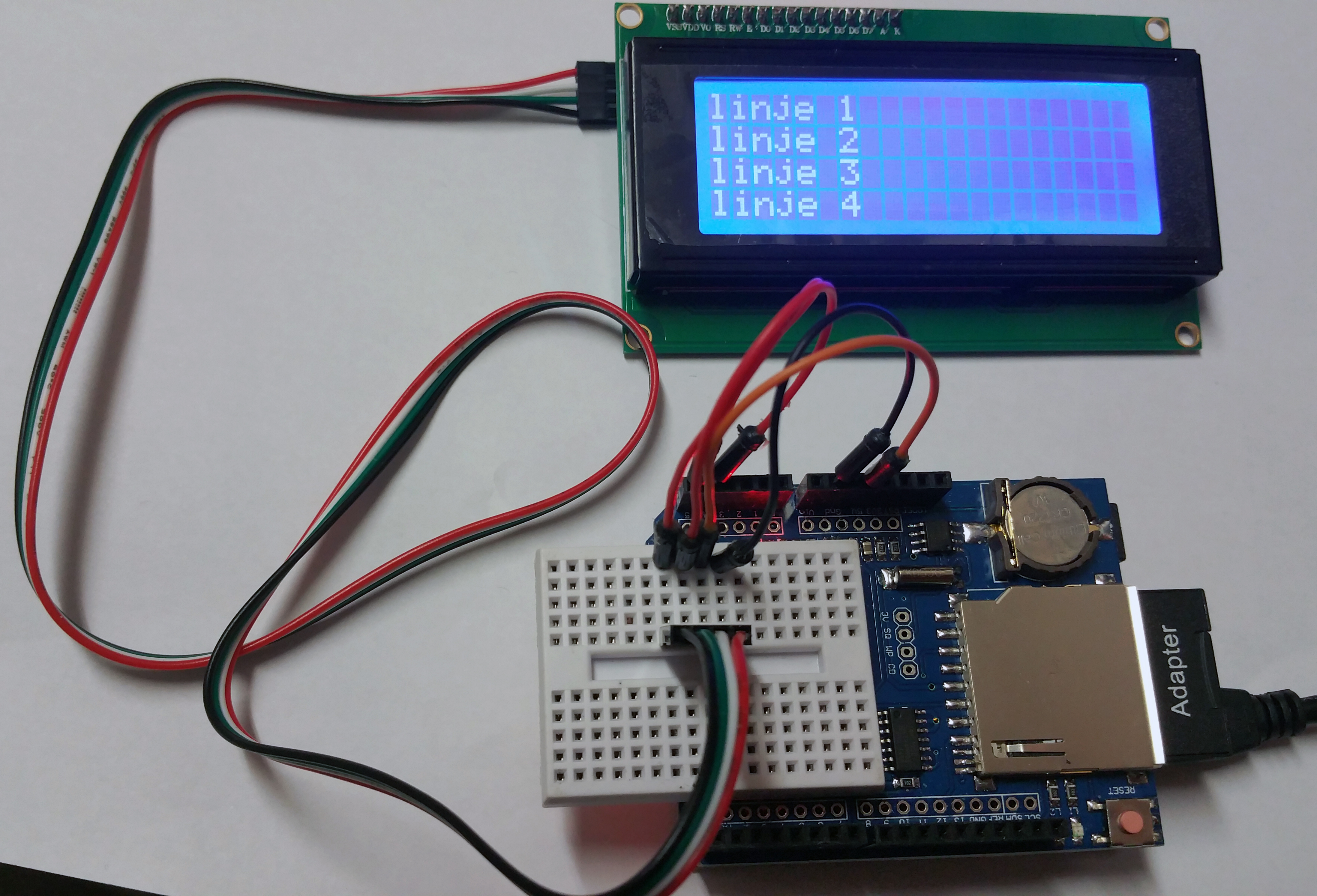 Ved å bruke interfacekretsen IIC/I2C/TWI/SPI Serial Interface Board Module Port for Arduino 1602LCD Display der alle koblingspunktene på TFT-displayet kan kobles direkte til denne interface-enhent. Da kan kommunikasjonen med TFT-displayet bli enklere med burk av I2C-bus,både med hensyn til hardware og software.
Ved å bruke interfacekretsen IIC/I2C/TWI/SPI Serial Interface Board Module Port for Arduino 1602LCD Display der alle koblingspunktene på TFT-displayet kan kobles direkte til denne interface-enhent. Da kan kommunikasjonen med TFT-displayet bli enklere med burk av I2C-bus,både med hensyn til hardware og software.
SCL kobles til A4, SDA kobles til A5, Vcc til 5v Gnd til 0V
Nedlasting av CSV-fil
 Dette programmet laster ned CSV-filer fra com-port og lagrer den på disken. Før man kan starte nedlastingen, må COM-port bestemmes, hastighet og filnavn. Da vil Start-knappen bli aktivisert. Nedlastingen starter når Startknappen trykkes. Filinnholdet vises i listevinduet. Stopp-tasten, som ble aktivisert etter at nedlastingen har startet, stoppe nedlastingen. Da vil Start-knappen bli aktivisert. Dersom den trykkes, vil nedlastingen som da skjer, bli lagt til fila som allerede er opprettet. Lukk-tasten lukker programmet.
Dette programmet laster ned CSV-filer fra com-port og lagrer den på disken. Før man kan starte nedlastingen, må COM-port bestemmes, hastighet og filnavn. Da vil Start-knappen bli aktivisert. Nedlastingen starter når Startknappen trykkes. Filinnholdet vises i listevinduet. Stopp-tasten, som ble aktivisert etter at nedlastingen har startet, stoppe nedlastingen. Da vil Start-knappen bli aktivisert. Dersom den trykkes, vil nedlastingen som da skjer, bli lagt til fila som allerede er opprettet. Lukk-tasten lukker programmet.
ESC styrt med likespenning
Publisert 2. jan. 2017
Build an ESC (Electronic Speed Controller)
This video tutorial has a lot of theory in it. I've tried to explain all the steps that I've followed while building an ELECTRONIC SPEED CONTROLLER. The project last more than 3 months because I had to understand all the electromagnetic laws, check all the components specifications and design the board in souch a way that it would have all the desired requirements.
RC-kontroll av ror og motor
asdf asdf sf
Gassdetektorer
MQ-2: Propan, hydrogen, naturgass
MQ-3: Alkohol, benzin
MQ-4: Metan
MQ-5: LPG, naturgas, kullgass
MQ-6: Propan, butan
MQ-7: CO
MQ-8: Hydrogen (LPG, alkohol, kokegasser)
MQ-9: LPG, CO, CH4.
MQ-135: Ammonia, nitrogen oxide, alcohols, aromatic compounds, sulfide and smoke
MQ-136:DC 5V H2S Hydrogen Sulfide Gas Sensor Module Qualitative Detection
MQ-137: Portable Ammonia Gas Sensor Detection Module Fire Detector
MQ-138: Formaldehyde Aldehydes Gas Detection Sensor
MQ-214: Methane Gas Sensor
MQ-216: Sensitive for Natural gas, Coal gas.
MQ-303A: Sensitive for Alcohol, Ethanol, smoke
MQ-306A: Sensitive for LPG, butane gas
MQ-307A: Sensitive for Carbon Monoxide
Gas Sensor Comparison
| Sensor | Detects | Heater Voltage |
|---|---|---|
| MQ-2 | Methane, Butane, LPG, smoke | 5V |
| MQ-3 | Alcohol, Ethanol, smoke | 5V |
| MQ-4 | Methane, CNG Gas | 5V |
| MQ-5 | Natural gas, LPG | 5V |
| MQ-6 | LPG, butane gas | 5V |
| MQ-7 | Carbon Monoxide | Alternating 5V and 1.4V |
| MQ-8 | Hydrogen Gas | 5V |
| MQ-9 | Carbon Monoxide, flammable gasses. | Alternating 5V and 1.4V |
| MQ131 | Ozone | 6V |
| MQ135 | Air Quality (Benzene, Alcohol, smoke) | 5V |
| MQ136 | Hydrogen Sulfide gas | 5V |
| MQ137 | Ammonia | 5V |
| MQ138 | Benzene, Toluene, Alcohol, Acetone, Propane, Formaldehyde gas, Hydrogen | 5V |
| MQ214 | Methane, Natural gas | 6V |
| MQ216 | Natural gas, Coal gas | 5V |
| MQ303A | Alcohol, Ethanol, smoke | 0.9V |
| MQ306A | LPG, butane gas | 0.9V |
| MQ307A | Carbon Monoxide | Alternating 0.2V and 0.9V. |
| MQ309A | Carbon Monoxide, flammable gasses | Alternating 0.2V and 0.9V |
| MG811 | Carbon Dioxide (CO2) | 6V |
| AQ-104 | Air quality | - |
Datasheets
| Name | Size | # Downloads |
|---|---|---|
| SNS-MQ135.pdf | 144.97 kB | 4434 |
| MQ2.pdf | 179.82 kB | 6330 |
| MQ-3.pdf | 54.95 kB | 2172 |
| MQ-4.pdf | 52.71 kB | 2260 |
| MQ5.pdf | 59.55 kB | 2300 |
| MQ-6.pdf | 53.88 kB | 1889 |
| MQ-7.pdf | 52.19 kB | 3700 |
| MG811.pdf | 95.92 kB | 2401 |
| ESP3SAQ201.pdf | 165.46 kB | 3992 |
| MQ307A.pdf | 151.27 kB | 3396 |
| MQ303A.pdf | 152.2 kB | 1363 |
| 1341.pdf | 39.66 kB | 3689 |
| MQ-138.pdf | 59.92 kB | 8440 |
| NH3.pdf | 143.21 kB | 1332 |
| MQ-136.pdf | 142.92 kB | 3596 |
| Ozone.pdf | 154.03 kB | 1654 |
| MQ9.pdf | 176.2 kB | 2547 |
| MQ-8 Ver1.3 - Manual.pdf | 451.29 kB | 1662 |
Underkategorier
modellbåt Antall artikler: 18

Denne modellbåten av en amerikansk Arleigh Burk class destroyer ern en skalmodell i målestokk 1:87 (HO) Den er 1.87 meter lang og drives av to sykronmotorer på propellene. Hovedkontrollen er en Arduino DUE mikrokontroller, lastet opp med et Free-RTOS-basert multitask-system. Sensorene og styringsenhentene er koblet til et CAN-nettverk for kommunikasjon med hovedkontrolleren. Kommunikasjon ser med RF, RC, WiFi, Bluetooth og LoRa protokoller til base og dronerepeatere som fungerer som en simulert geostasjonær sattelitt for kommunikasjon med båten. Den har en områdesscanner som scanner nærområdet opp til 40 meter. Sensorene måler temperatur, trykk, fuktighet (relativ partialtrykk for vann), en rekke gasser (CO2, O2, O3, CO, metan og en rekke andre hydrokarbongasser)